
Author: Kamron Ebrahimi
OPEnS House:
OPEnS House 2019 was a public event where academics from Oregon State University and industry professionals interested in environmental sensing could check out some awesome projects, ask questions and get a better idea of some of the research going on within the lab.
For the event the SlideSentinel team decided to get a working demo up and running to showcase the system so far. This demo provided the perfect opportunity to integrate working components into a single coherent system.
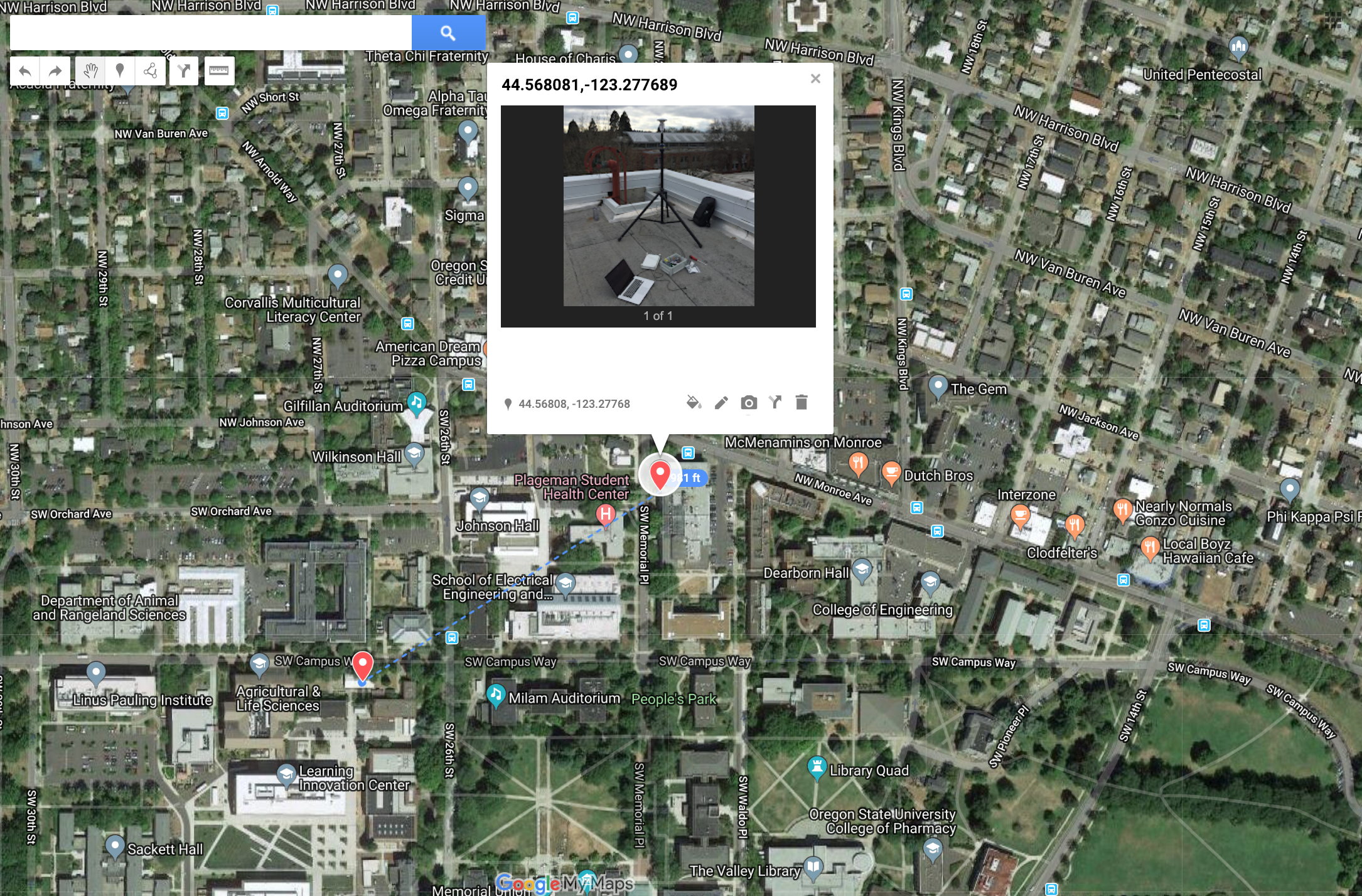
To set the demo up the team deployed the hub on top of OSU’s Weiniger Hall. The Hub contained the RTK GPS module, the Freewave Z-90 for receiving NMEA strings from the rover and the Adafruit FONA 808 for making HTTP requests to the PushingBox API capable of logging the rover locations in realtime to a Google spreadsheet. The total distance between the hub and rover was roughly 1000ft. This was super exciting news as the link travelled through multiple concrete buildings and data was still being received by the hub, intact and at a consistent rate.
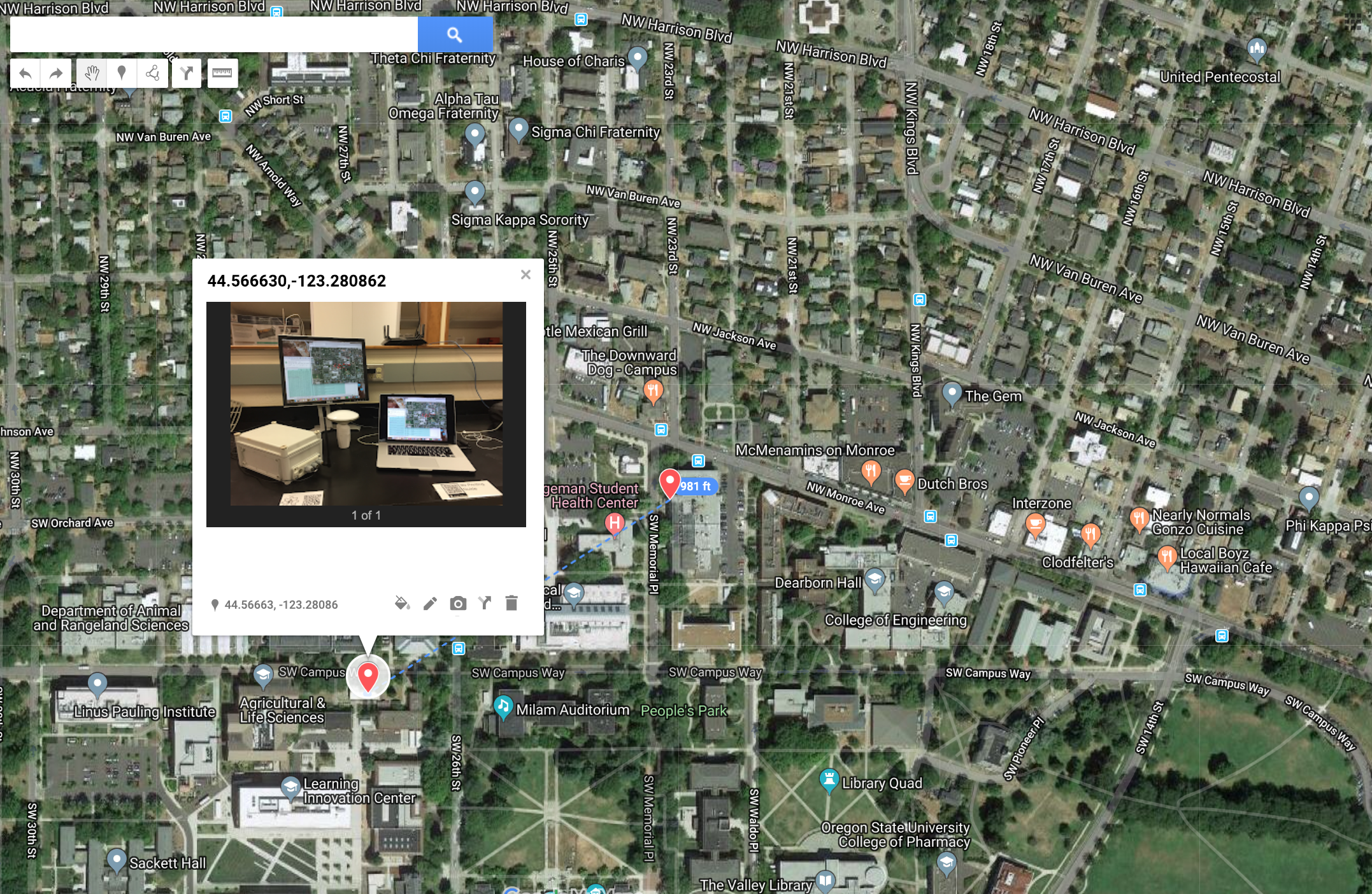
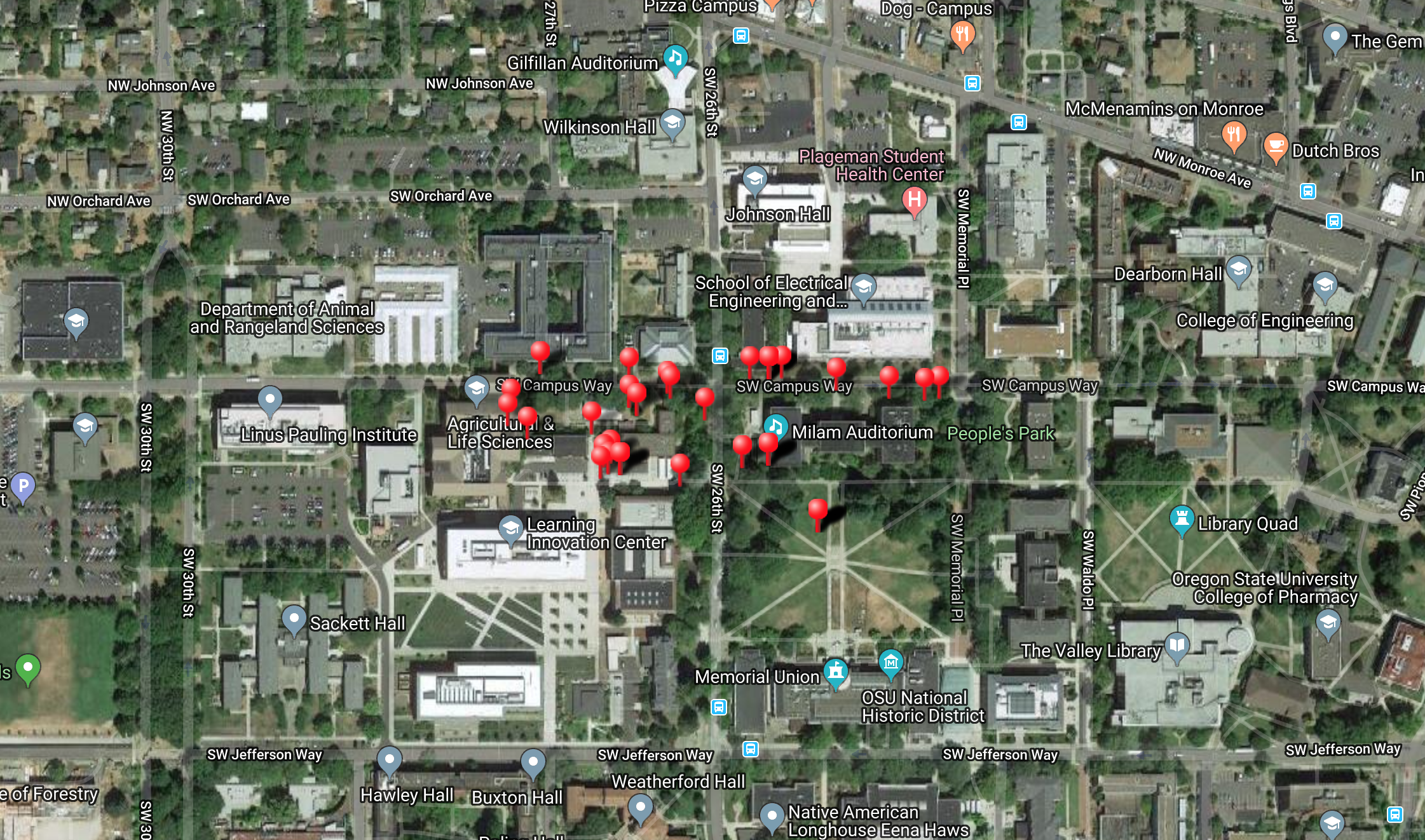
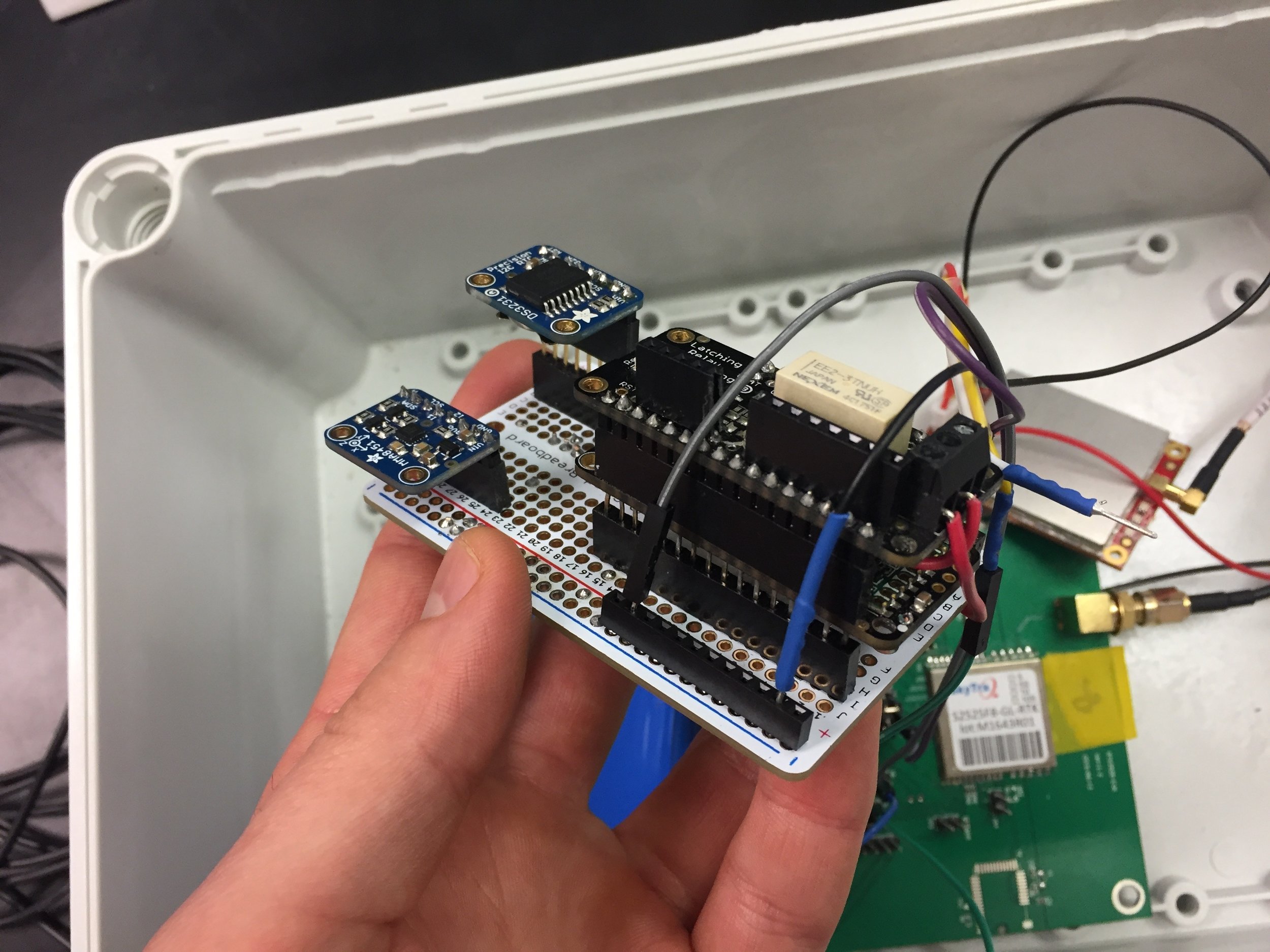
The Rover for the demo featured a relay module tired to a real time clock and accelerometer. Upon substantial orientation change or movement the accelerometer would flip the relay to power the devices, and the Rover would attempt to get an RTK fix and begin sending NMEA strings to the hub. For a better visual representation of the system the team logged the coordinates on the Google spread sheet to a Google map in real time.
The demo went incredibly well and it was super exciting to see all of the components working together! During the live demonstrations team members would take the rover and go on a brief walk, and spectators could observe as the rovers location was logged live to the Google map in real time.
The OPEnS house was an awesome opportunity to showcase some of the work that has gone into this project. The team met multiple other researches and academics interested in the technologies we are developing and are looking forward to a live deployment in March.