
Abstract:
Today I confirmed that the range of the LoRa devices is at least 1-2 km; the documented range on Adafruit’s website is 2km line of sight in an open area. I took a walk and brought along one LoRa radio to the far west side of campus.
Procedure:
Code on the Pro Trinket and the Arduino has been modified to send updated sensor values to and from the transmitter as packets of data. I the receiver along on my walk and waited for the LED to stop blinking indicating that nothing was being transmitted. In the video below, the red LED on both radio units lights up if the sensor hooked up to the transmitter sends a value below 36 cm to the receiver:
Results:
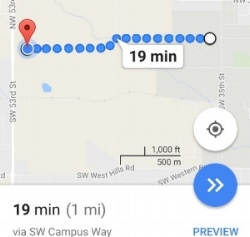
About 1.6 km (a mile) of open space was between the receiver and the transmitter before I reached some tall trees and the connection began to cut out.
What’s Next:
Now that I have the two radios constantly sending signals back and forth, my next job will be implementing a timer to limit the sending of sensor values to once every second and eventually use the LoRa radios into transmit data from a rain catchment device.
– Marissa Kwon Undergraduate Student Researcher