Author: Kamron Ebrahimi
What is ROCKBLOCK?
ROCKBLOCK is an out of the box satellite communication module manufactured by Rock7. The device is constructed to interface with embedded microprocessors such as Arduino’s and Raspberry Pi’s. What makes the ROCKBLOCK such an incredible device (and also an appealing tool for the SlideSentinel project) is the fact that it can send Short-Burst Data (SBD) through the Iridium Satellite constellation, an aggregate of 66 active satellites used for worldwide voice and data communication. This means that projects using the ROCKBLOCK satcom module can send and receive data from a basestation from just about anywhere on the surface of the Earth that is exposed to the open sky.
Slide Sentinel Use Cases

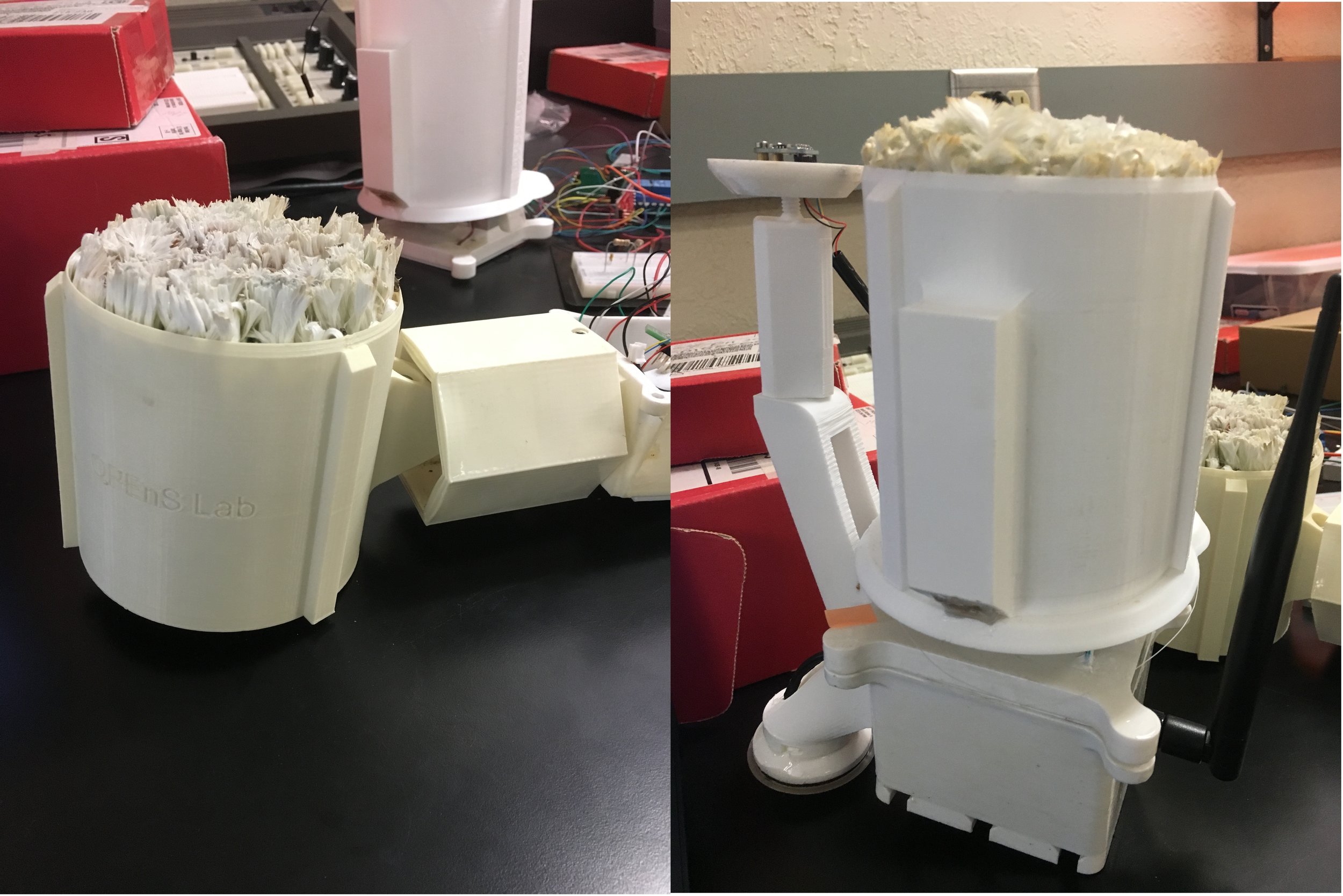
ROCKBLOCK+ placed outdoors for signal testing.
Due to the remote nature of the SlideSentinel deployments and potential weather hazards, the team has opted to use the ROCKBLOCK module for sending data from the base node to servers where it can be further processed and recorded via Google spreadsheets.
ROCKBLOCK+ Interface
The ROCKBLOCK+ exposes a 7 wire interface
- GND
- 9-30 VDC input
- RS232 TX
- RS232 RX
- On/Off control (sleep pin)
- Ring Alert Indicator
- Network Availability
For simple use cases involving synchronously sending data, the only needed pins are the RX and TX lines, however the On/Off control pin, Ring Alert Indicator, Network Availability offer useful functionality which merit discussion. The ROCKBLOCK+ has an internal super-capacitor which requires roughly 10 seconds to charge. Once charged the module can begin sending data. If you are constructing a time critical application the On/Off control pin puts the module into a “sleep” mode, in which minimal power is consumed to maintain the super-capacitors charge. This allows the module to wake up quickly (perhaps due to an interrupt) and skip the 10 second capacitor charge wait before sending data.
The ring alert indicator is an active low output from the ROCKBLOCK+. When the voltage on the pin goes low there is a in incoming message in the MT queue which can be read by the module. This pin is useful for bidirectional communication with the module.
Finally the ROCKBLOCK+ presents an active low network availability pin. When the ROCKBLOCK+ module is on, the device periodically polls for an available Iridium satellite connection. If such a connection is found there is a high likelihood that data can be sent and received by the device and the network availability pin will go low.
For the official developer documentation on the ROCKBLOCK module follow this link.
Talking the ROCKBLOCK+’s Language, RS232
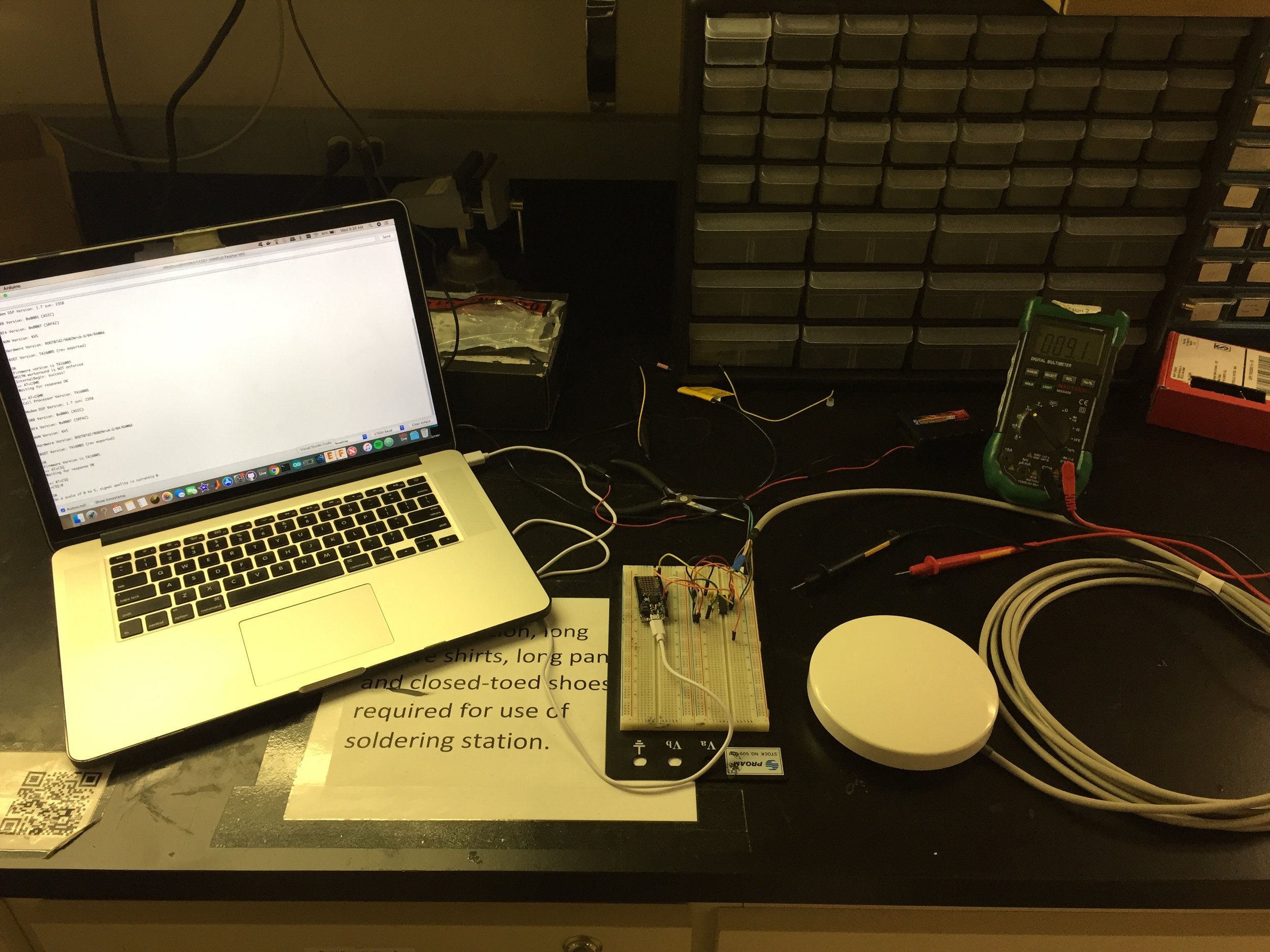
All outputs and inputs to the ROCKBLOCK+ must present RS232 voltage levels. Thus if communicating with the module with a TTL device an RS232 level shifter must be used. In the case of the SlideSentinel project the Adafruit Feather is used to send AT commands to the module. For testing the module on a breadboard we used the MAX3232 IC, which convert 3.3 volt TTL to RS232 and has two line drives and receivers. This linked article provides a concise explanation on the RS232 standard.
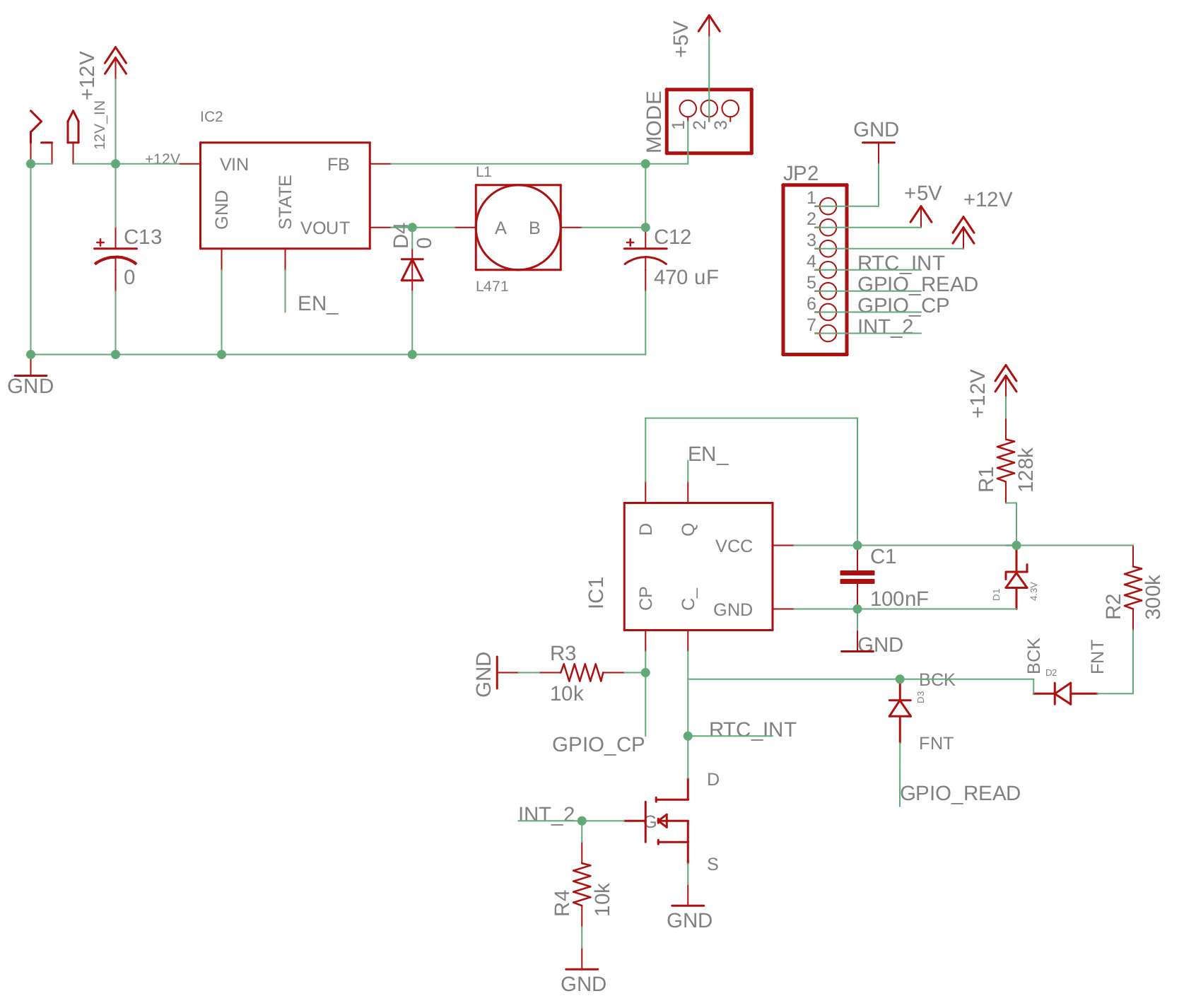
In order to receive the network availability, On/Off, and ring indicator signals an RS232 level shifter with at least four receive lines is required. For the SlideSentinel PCB interface to the ROCKBLOCK+ we decided to use the MAX3242 IC which presents 5 receive lines and 3 transmission lines.
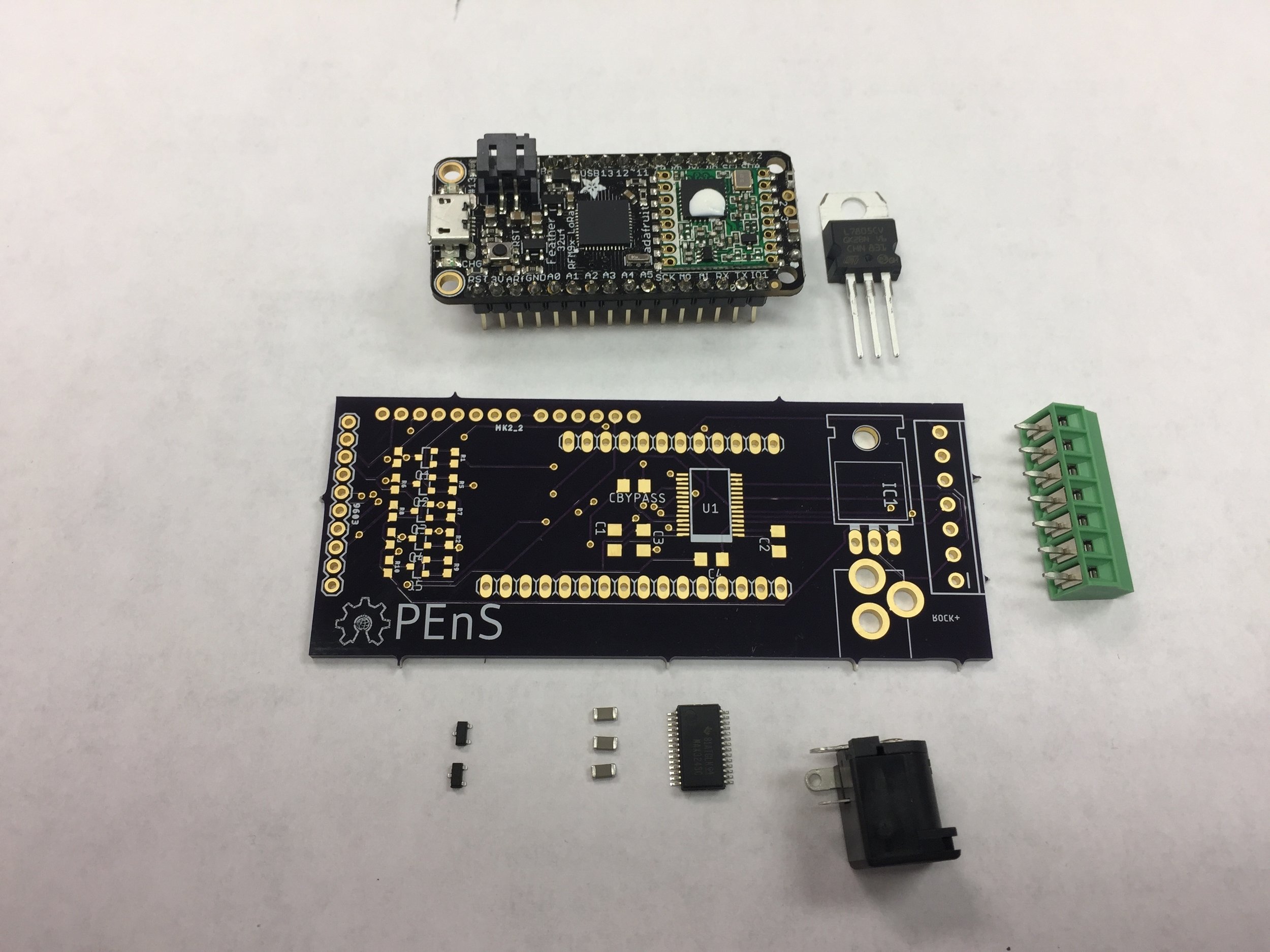
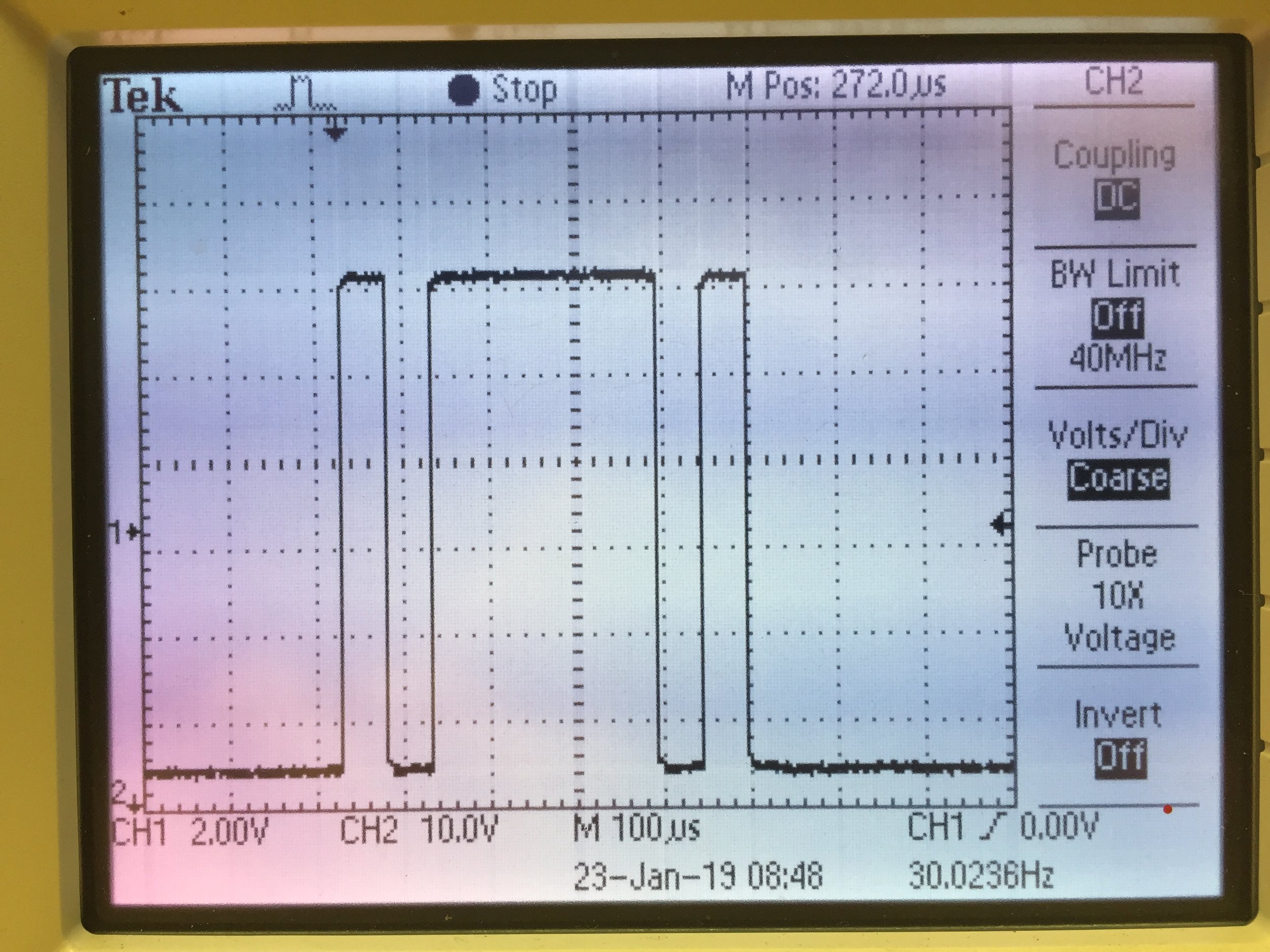
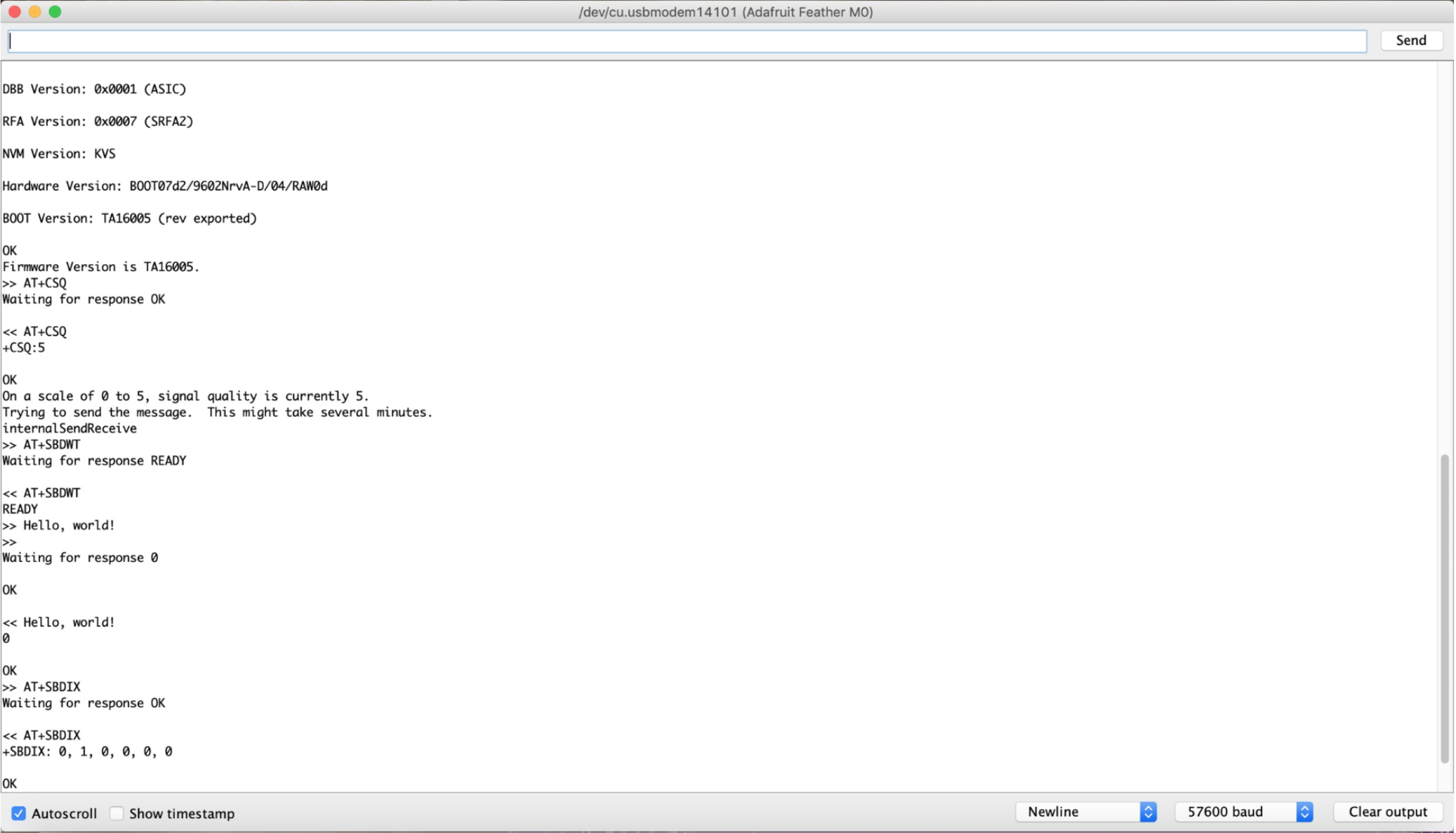
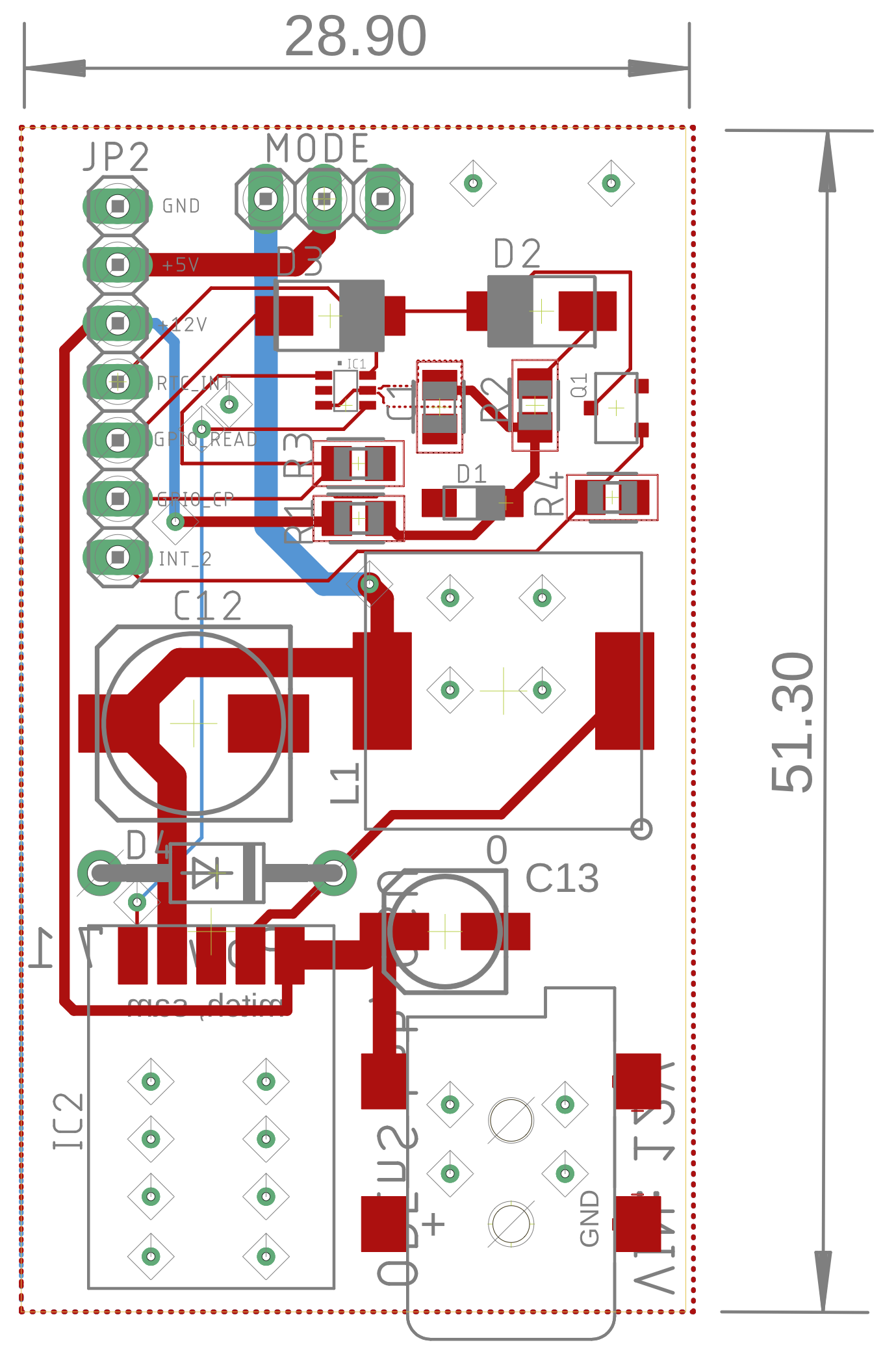
With the RS232 interface configured the last step is sending AT commands to the module. The IridiumSBD is a convenient library for interfacing with the modem. Below are three photos depicting the a serial output from an Arduino script which communicates with the ROCKBLOCK+, a picture of the probed RS232 UART signals between the Arduino and ROCKBLOCK and the PCB designed to interface with the module for the Adafruit Feather. The Arduino script asks the module for its firmware version, then is asks the module for a number between 0-5 indicating signal strength and finally sends an AT command which transmits the string “Hello World.”