Author: Brett Stoddard
Hi everyone, this week has been an exciting one for the world of OPEnS RFID moisture sensing. Since the update, we have found ways to make the sensors even more reliable and sensitive. Two updates have allowed for this development.
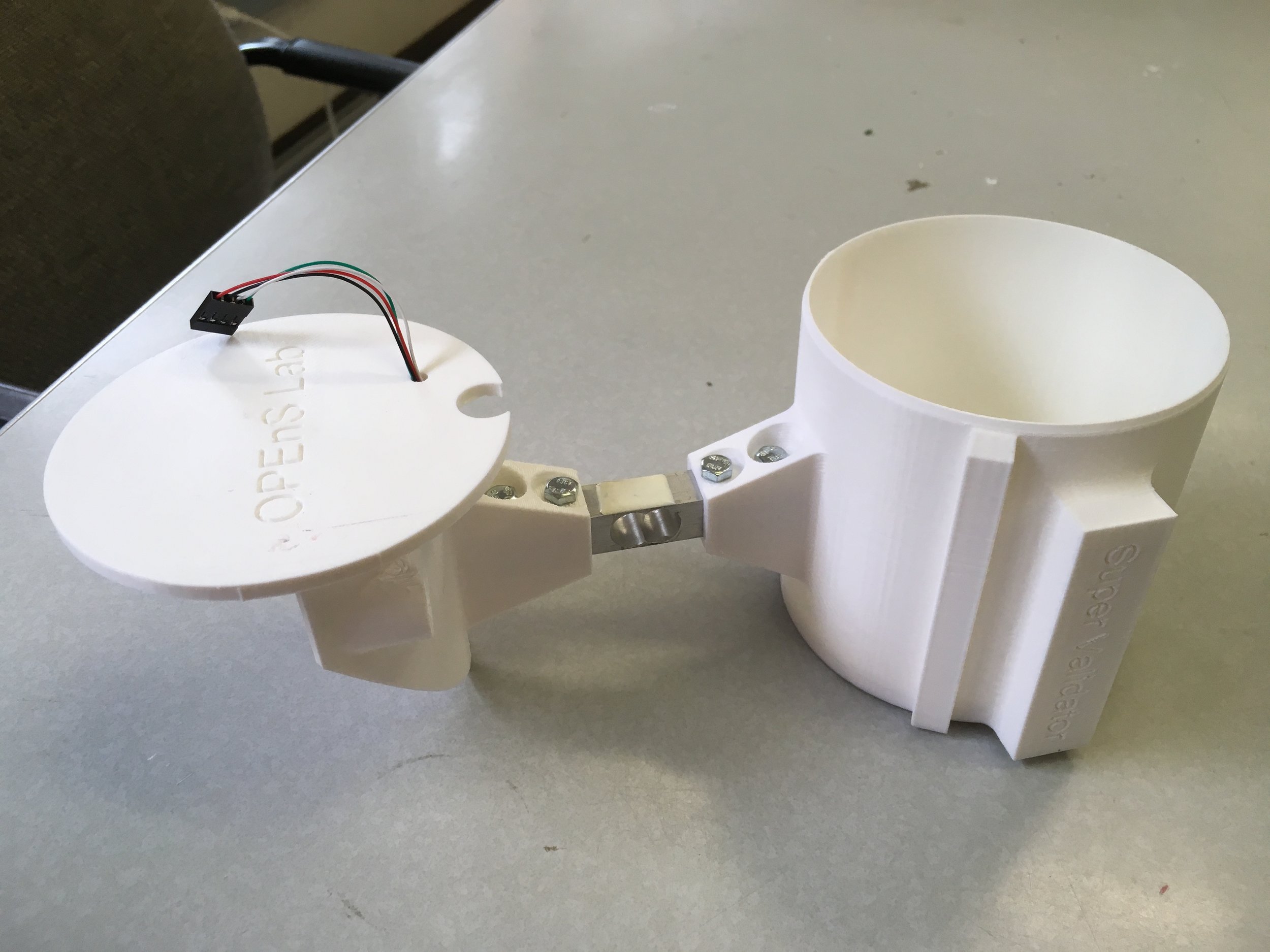
The first major modification came when “tails” were added to the RFID tag. These tails are made out of a paperlike material that’s designed to suck up and hold and moisture it comes into contact with. The more moisture it touches, the more water it sucks up thanks to capillary action. Tails can be positioned on the sensor to hold the liquid in the most moisture sensitive area of the tag to maximize the accuracy of readings. Sure enough, as soon as we started gathering data with the tails attached the reliability of our measurements improved by a lot. An image from one of Smart Trac’s technical documents showcases the tail below. All future testing will be done using these tags.

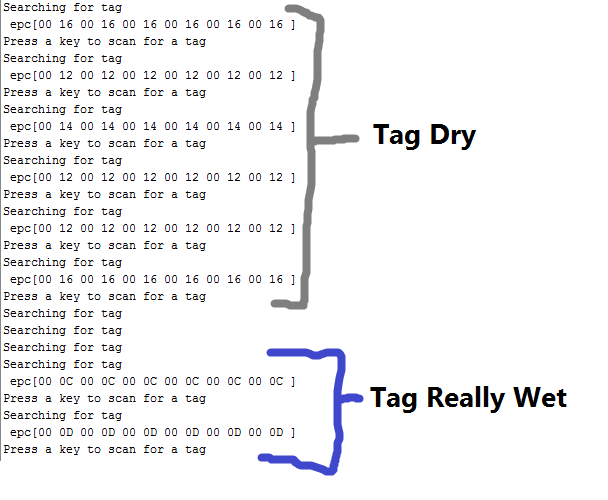
The second change was implemented on the software side of things. Before this week the sensor value was only read once and then outputted. The new code took 100 readings and then outputted the mean value. By using this method, more reliable and accurate readings were made. These new readings improved consistency across all of the tags for sensing extremely wet, extremely dry, and moist tail conditions. In the future, we will examine the exact distribution of the readings to determine the minimum number of readings that are needed to get a value with 80-90% certainty. The example code can be seen in this folder of the RFID library. This code is not yet optimized.