
Author: Brett Stoddard
Hello all, it’s been a while since the last sensor status but from now on I’ll be working to increase my posting frequency.
Since the last update, many things have been happening on the sensor end. First, the OPEnS lab bought a new RFID module to interface with the Arduino UNO and have semi-officially scrapped the LinkSprite LSID-0702 reader. From here on out, we will be using the SparkFun Simultaneous RFID Reader – M6E Nano shield. I was really excited to get working with this reader because it’s documentation is a lot more readable and through than the other modules I’ve worked with.
That documentation included a SparkFun proprietary library especially made for use with the Arduino UNO. I forked this library on GitHub and have been adding to it a few functions specifically geared towards reading the moisture information from Smart Trac RFID tags. For the most part, these functions seem to work! The original SparkFun library is available by clicking here. The OPEnS lab version of it that I have and will be adding to can be found by clicking here.
The rest of this blog post will be dedicated to the results of tests run to prove that the retrieved values are dependent on the actual moisture of the chips. “Wet” tags were held under a stream of moving water in the sink for five to ten seconds. “Dry” tags are either tags that were never wet or ones that were set out to dry for a few days.
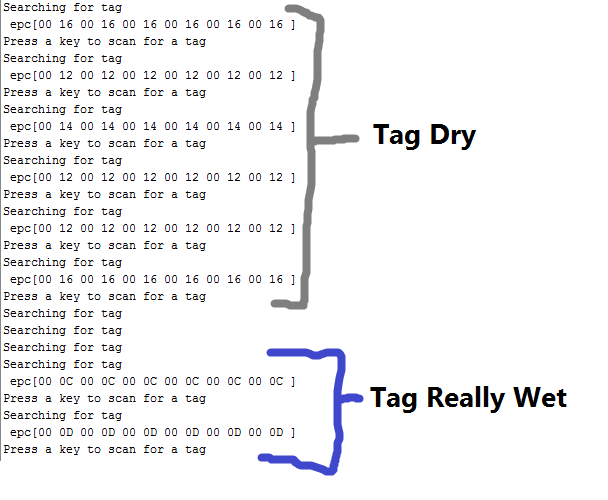
This data was gathered by modifying a read EPC byte command to read a different registry. What that means is that the data is unparced and looks gross. The important thing from this data is that the sensor code was reading a different number when it was wetted. When dry the tag had a value of either 12 or 14 HEX (18 or 20 decimal). Then when that same tag was run under the sink it read a value of 0C or 0C HEX (12 or 13 decimal). Being able to tell the difference between really wet and completely dry is a large step forward for this project and this data, if consistent, will allow us to do just that. However, as always, more testing will be needed to make this process robust enough for use in the field.

