Author: Marissa Kwon

Abstract:
On Thursday July 27th, members of the OPEnS Lab finally deployed a working prototype of the Evaporometer at the HJ Andrew’s Experimental Forest. They were accompanied by Professor Bo Zhao, a member of his data visualization team, and coordinators at the HJ Andrews Forest as the receiver hub was set up at a station near the Discovery Trail and the Evaporometer-transmitter was drilled into a log overlooking a stream.
Installing the Hub:
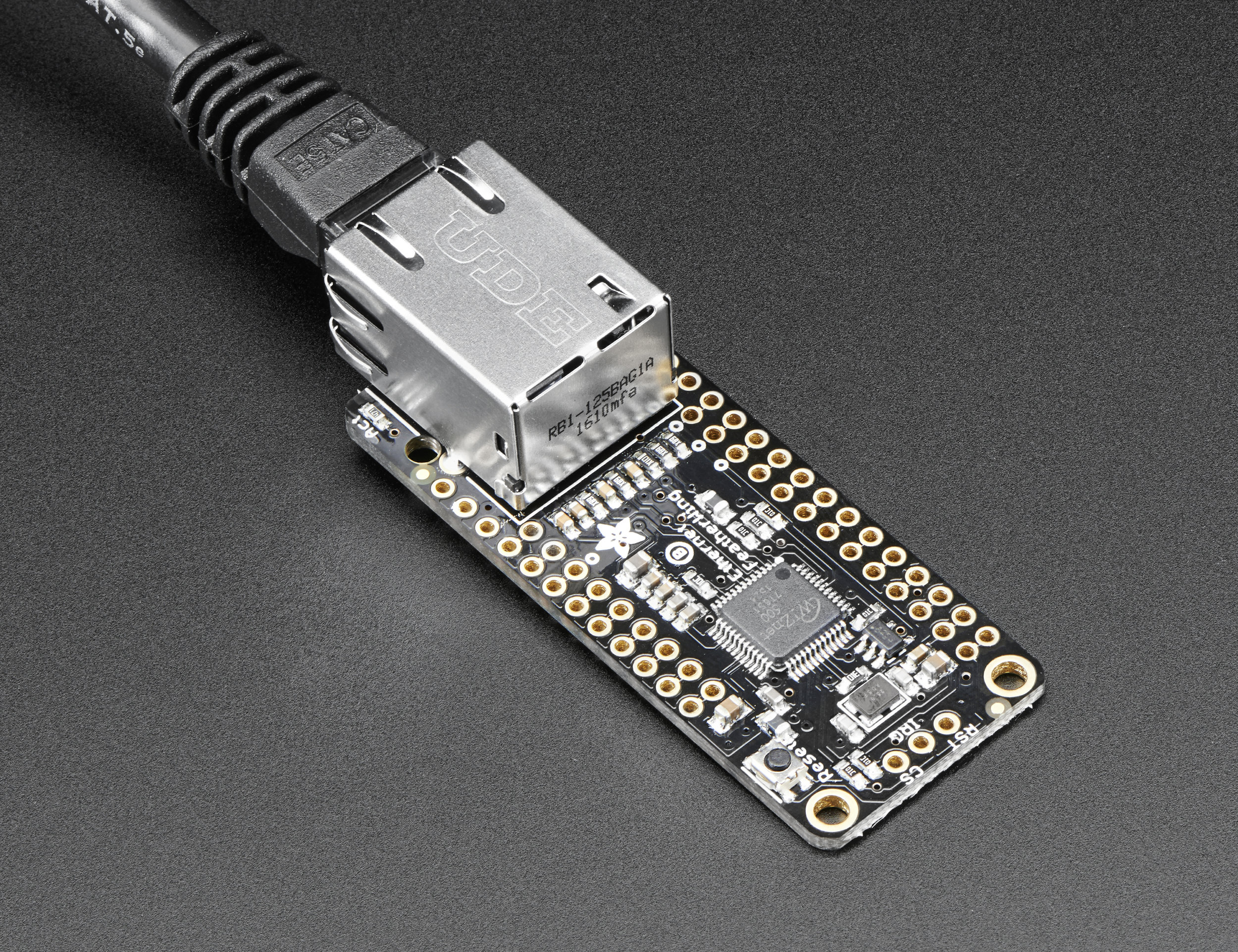
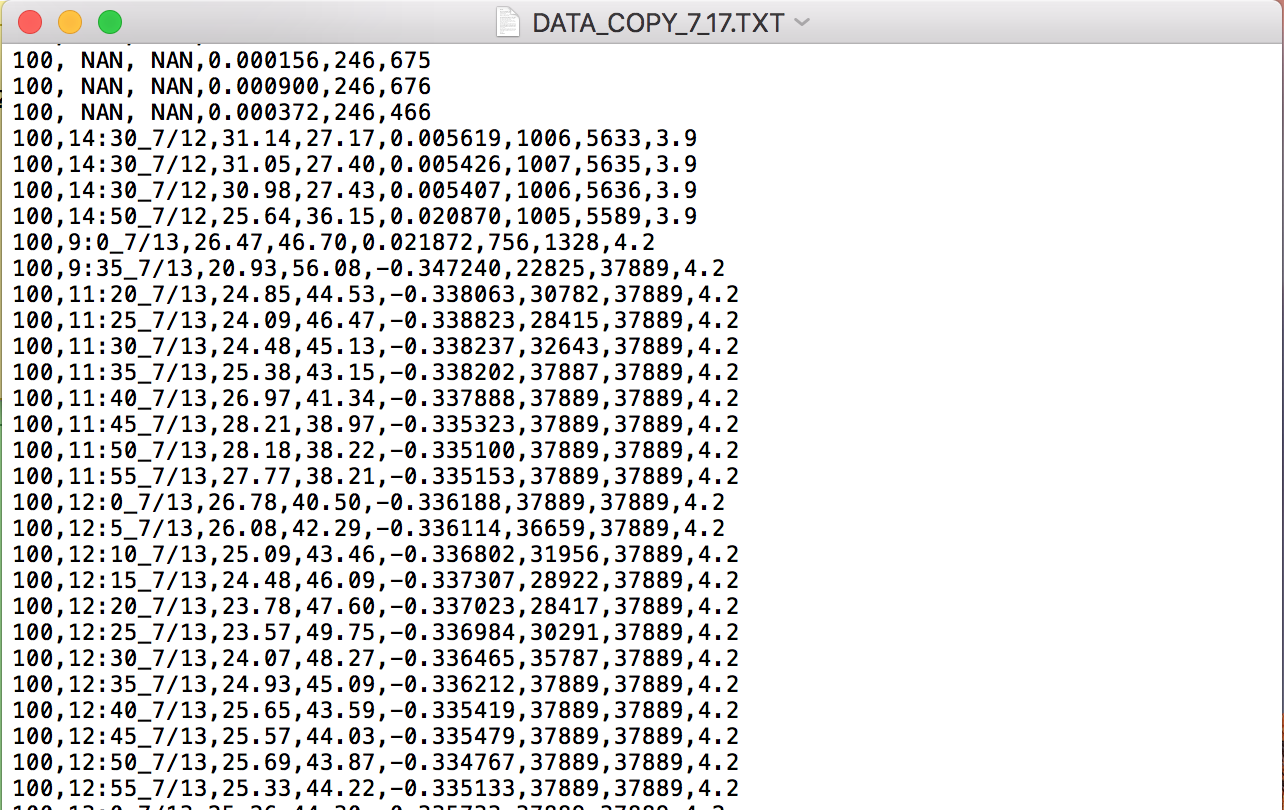
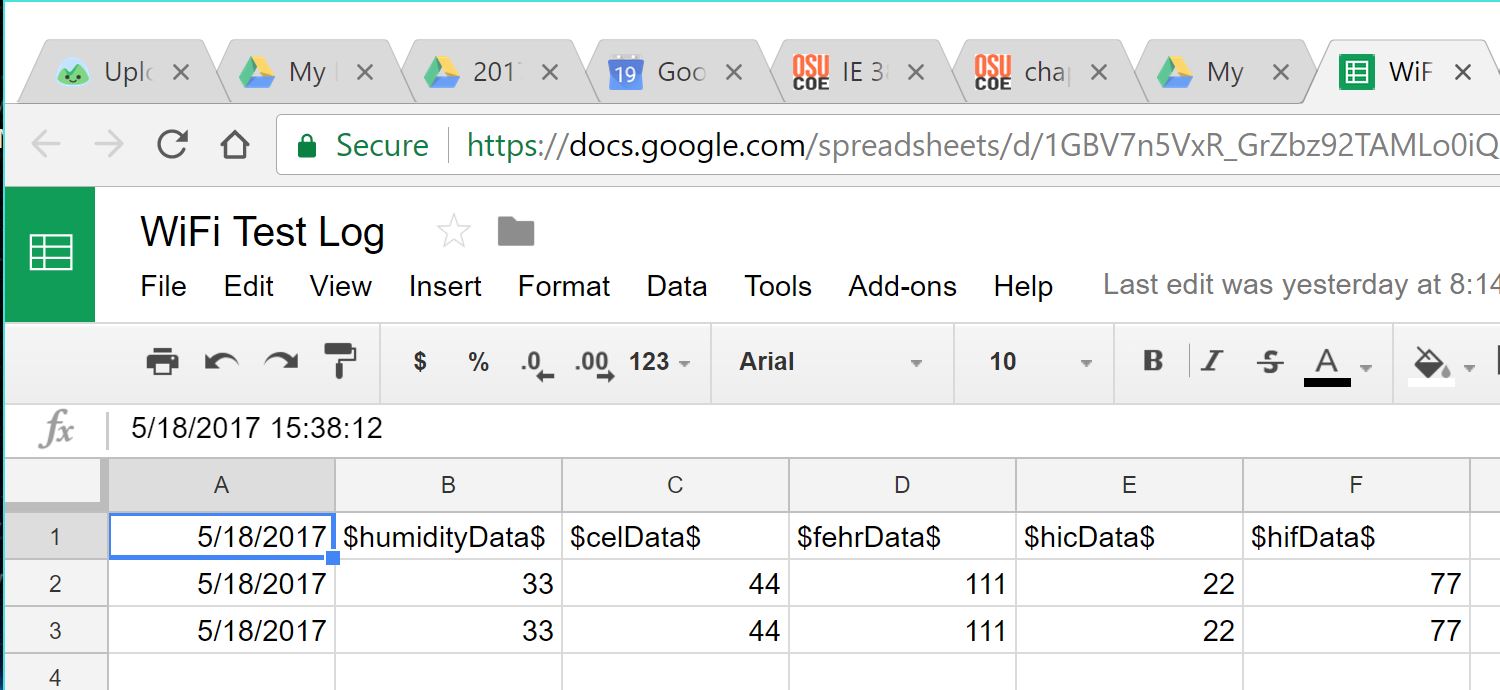
The finished receiver is programmed to write data to a local SD card and upload info to an online google spreadsheet when an ethernet connection is available. In addition to a reliable ethernet connection, the receiver requires an AC power source. An existing weather station located just off the path of the discovery trail equipped with wifi and power was the perfect location to install our sensor.
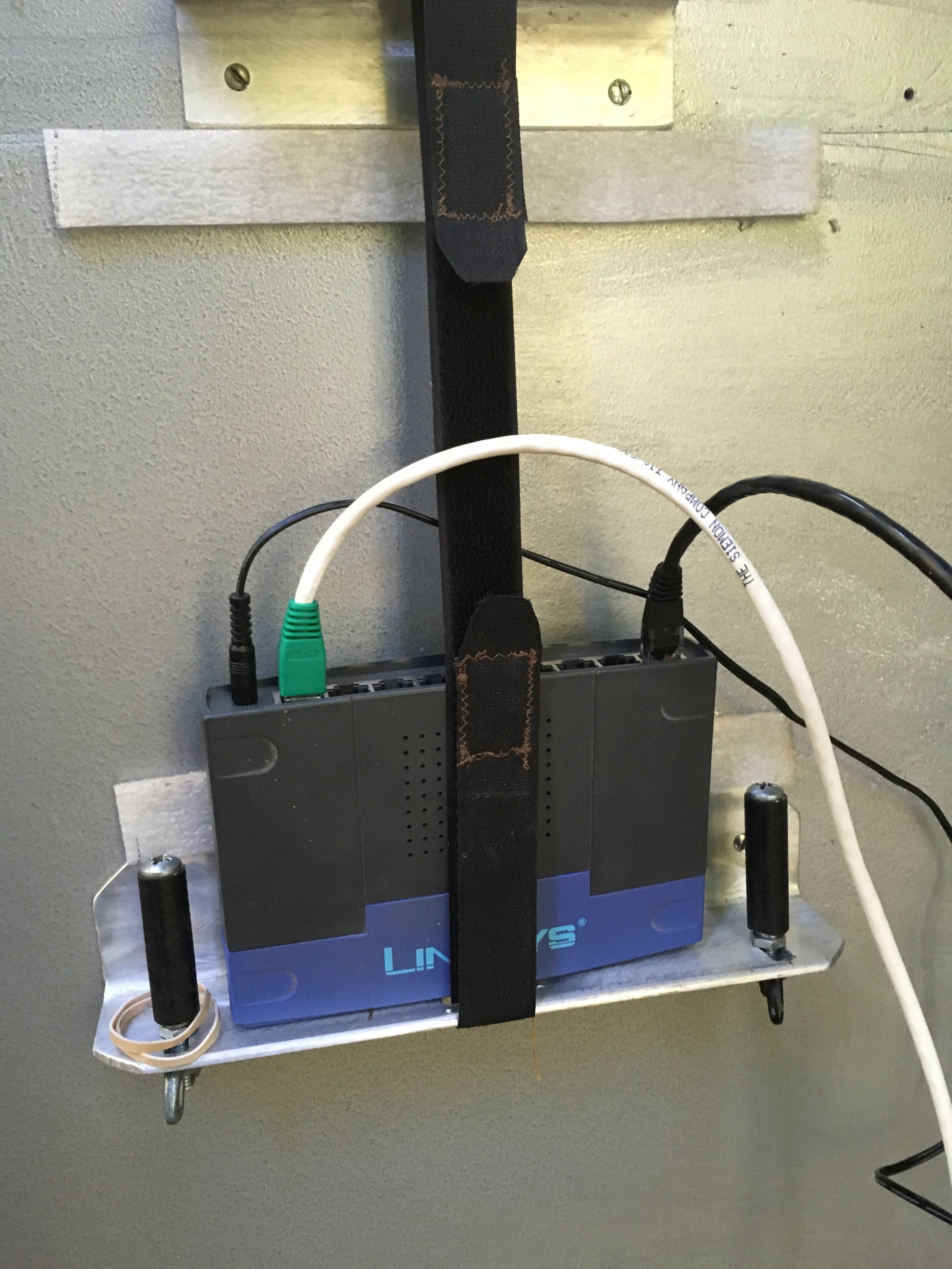
The router providing internet service to the hub hooked up to the inside of the weather station.

Our receiver hub connected to the power cables on the Discovery Trail weather station, recording transmissions from the Evaporometer.

Walking through HJ Andrew’s with the transmitter on debug mode, waiting for the loss of signal to be reported.
Deploying the Evaporometer:
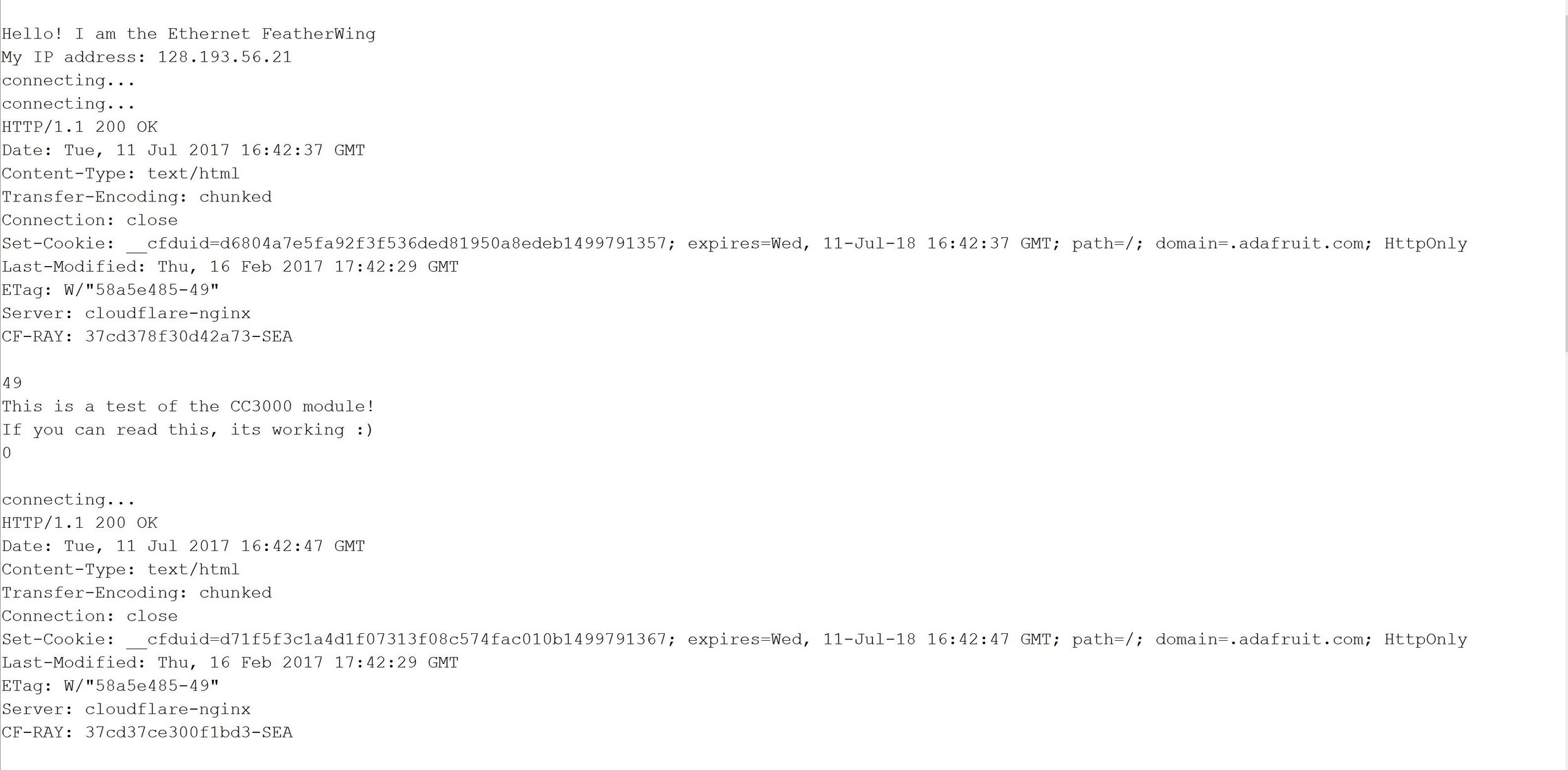
After the the receiver hub was installed the Evaporometer range was tested by placing the transmitter in debug mode and waiting for the signal to cut out. After walking through the forest, it was estimated that the transmitter could be placed up to a quarter of a mile away from the hub. The Evaporometer was reprogrammed off debug mode to transmit readings every 5 min. Then the strain gauge attachment was primed with 500 ml of water over a 20 minute period by holding a slow drip device over the wick, according to protocol. It was confirmed that data was uploading to our online spreadsheet and the visit to the forest was successful.

Using a smartphone to view data from our receiver hub, logged on a google spreadsheet.

Lab members Tom Debell and Chet Udell mount the device above stream.

The Evaporometer collecting evaporation, temperature, light, and humidity changes over a stream. As of 7/27/17 the Evaporometer is visible from OSU’s Webcam: HJA Flood Cam.
– Marissa Kwon, URSA Engage and Summer REU Student Researcher