Abstract: I’ve bee working on the ETA attachment and here is an update on what it looks like and where the design will go next.
Objective: The ETA is designed to hold the two light sensors and one humidity/temp sensor. The two light sensors will make the albedo measuring system, so one has to be looking up and one straight down. The humidity/temp sensor is going right under the light sensor that is looking straight up.
Methods: I’ve been using Fusion 360 to do the CAD and I will be 3D printing on the Fusion3 F400.
Results:
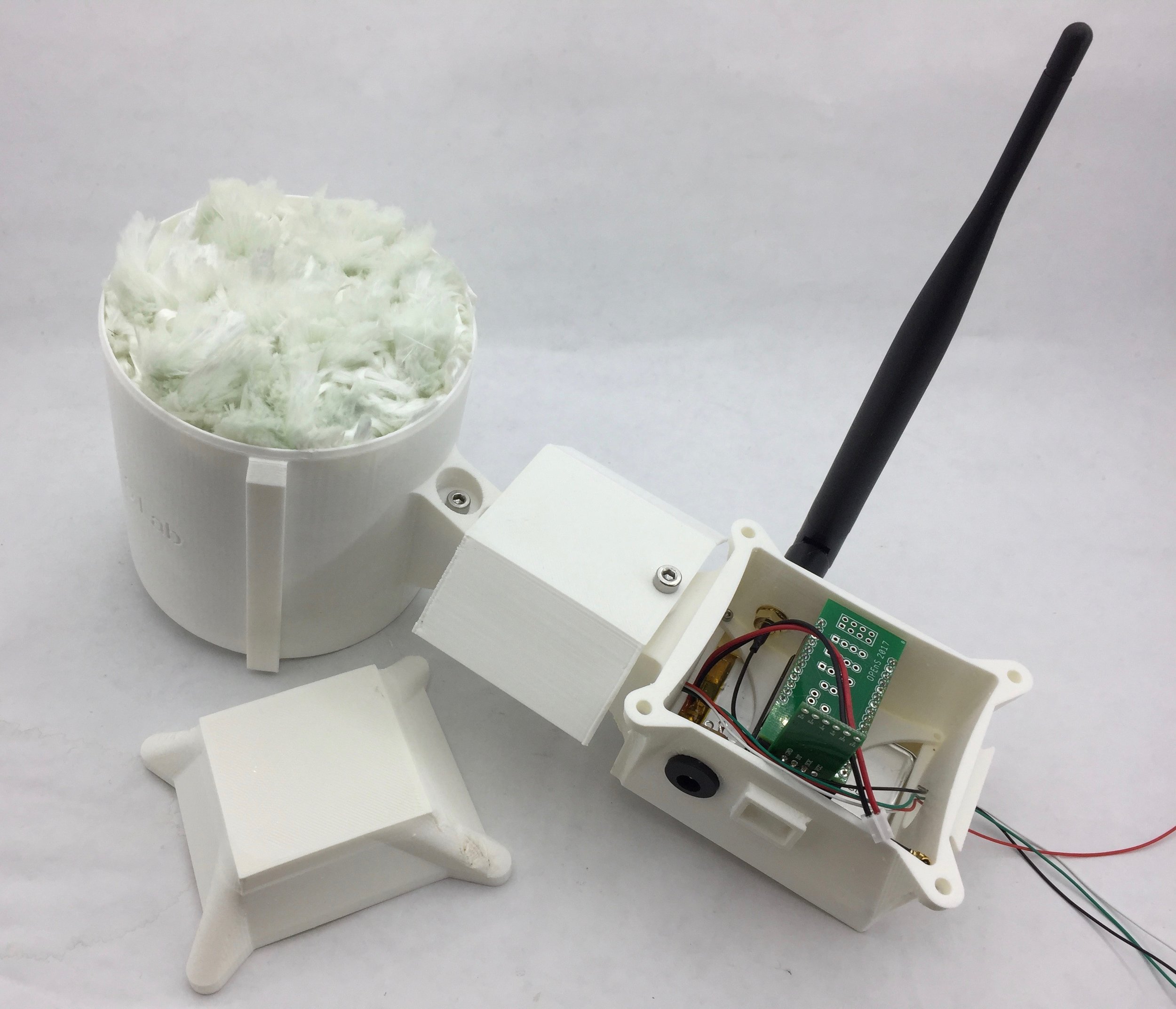
Here is the attachment piece from the sensors to the hub of the electronics. This has a slide mechanism that makes it easily detachable. This piece has to be put in first before the cap because the caps actually functions as a lock for this piece, it keeps it from sliding out in case that something bumps it.
This is a preliminary look at what the ETA will end up looking like. This rendering is still missing the disks that will be holding the two light sensors and the humidity/temp sensor. I had to do some redesign on the base to be able to accommodate the extruding piece of the ETA attachment, but I think that this piece is solid design and I can now move on to design in the bases for the sensors.
The bases, which will look like little disks, will hold the sensors. The one that will go on the 360 swivel will hold a light sensor on top and the humidity/temp sensor underneath. The other disk will go on the underside of the swivel, it will only hold a light sensor.